现代控制理论

状态空间基础
状态空间基本概念
状态:动力学系统的状态定义为信息的集合
注意点:动力学系统在
的状态是由 的状态和 后的输入唯一确定的,与 前的状态和输入无关 状态变量:能完全表征系统运动状态的最小一组变量,选取不唯一
状态向量:状态变量组成的向量
状态空间:由状态向量张成的向量空间
状态空间表达式:状态方程和输出方程组合
状态维度:完全表征动力系统动态行为状态的最小数目
注意点:与自由度不相等
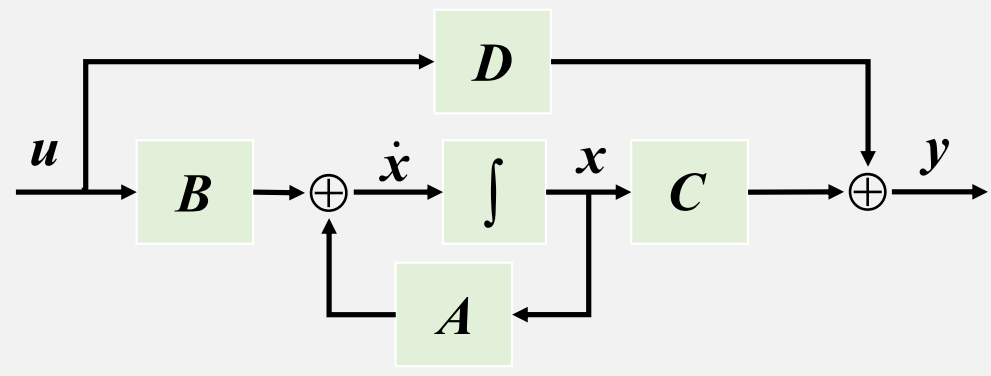
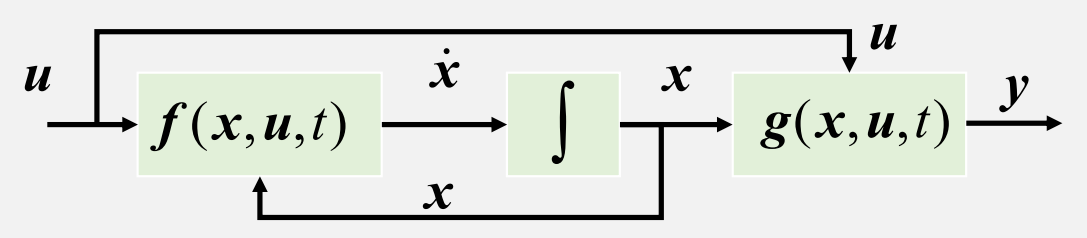
状态空间的一般形式
单输入单输出
线性系统:
非线性系统:
离散系统:
非线性形式
线性形式
状态空间表达式的建立
传递函数建立状态空间表达式
传递函数:
直接分解法
**
选取中间传递函数:
写为微分方程形式
状态空间表达式
这个形式叫能控标准型
**
传递函数降价
状态空间表达式
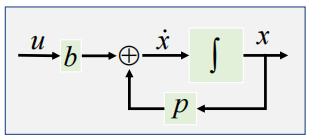
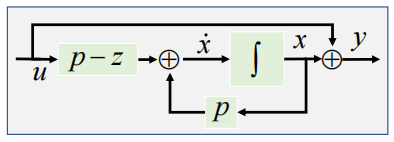
串联分解
**
传递函数整理
传递函数实现
- 基本环节1

- 基本环节2
系统逻辑框图
第一种分解方式

第二种分解方式

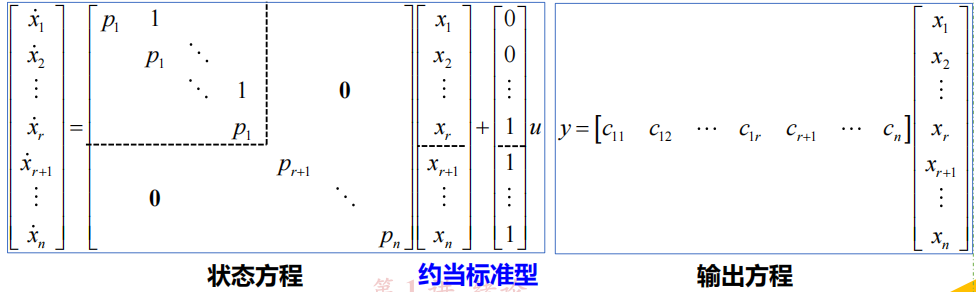
并联分解
**以只有一个r阶重根为例**
传递函数整理
中间变量选取
状态空间表达式
状态空间表达式的坐标转换
状态可逆线性变换(坐标系切换)
转换矩阵
坐标转换
状态空间表达式与传递矩阵的关系
注意点:状态可逆线性变换(坐标系切换)不影响传递函数
线性定常系统状态方程的解
齐次状态方程的解
纯量微分方程的解
纯量方程:
所以最终解为:
齐次向量微分方程: 取拉氏变换得: 最终结果跟前文相同这里也可以用拉氏变换法求解
我们记
当从
对于状态转移矩阵,它有以下性质:
是 微分方程的唯一解
状态转移矩阵的计算
直接计算
对角线
约当标准型


特征分解
Laplace变换
非齐次状态方程的解
非齐次向量微分方程:
零状态解的计算
Laplace变换
线性系统的可控性和可观测性
数学准备知识
凯莱-哈密尔顿(Cayley-Hamilton)定理
记系统矩阵
- 标题: 现代控制理论
- 作者: yjy12lcp
- 创建于: 2023-12-05 16:33:43
- 更新于: 2023-12-05 22:07:18
- 链接: https://yjy12lcp.cn/2023/12/05/现代控制理论/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。
评论