惯性导航基础

绪论
导航制导与控制
导航:引导运载体从出发点到达目的地的整个过程,包括了导航、制导与控制三个过程
导航系统:为了完成载体引导任务的设备称为导航系统,提供即时位置、速度和航向
制导系统:测量载体与目标的相对位置和速度,计算出实际飞行轨迹与理论轨迹的偏差,并给出消除偏差的指令
控制系统:主要是由执行机构(伺服机构)组成。其功能是根据制导系统给出的制导指令和载体的导航参数形成综合控制信号,再由执行机构调整载体的运动方式直至抵达(命中)目标
导航系统的分类
自主导航
运载体上的设备可单独产生导航信息。如:惯性导航、天文导航、地形匹配与景象匹配导航、地磁导航、重力场导航等
惯性导航:利用惯性元件(陀螺仪、加速度计)测得的加速度和角速度经过积分和运算得到运动体的位置、速度和姿态等导航信息
优点:完全自主、运动参数完备;实时性好
缺点:误差随时间积累
天文导航:通过观测星辰日月等按固定轨道运行的自然天体来确定航行体的位置,以引导航行体沿预定航线到达目的地的一种导航方法
优点:完全自主;误差不积累
缺点:导航精度受大气条件的影响较大
物理场导航:通过传感器实时测量的地球物理场信息(如磁场、重力场等)与储存在载体导航计算机中的地球物理场基准信息进行匹配来确定载体导航参数
优点:误差不积累;具有良好的隐蔽性和抗干扰性;提供绝对位置信息
缺点:需存储大量地球物理场数据;导航信息不连续
非自主导航(无线电导航)
利用无线电波的传播特性(沿直线,速度恒定,会反射)测定飞行器的导航参数(方位、距离和速度)
卫星导航:全球性的位置与时间测定系统,能够为地球表面、近地空间和地球外空任意地点用户提供全天候、高精度的三维位置、速度以及精密的时间信息
优点:全天候、高精度;误差不积累
缺点:抗干扰性能较差
两种导航系统的特点
无线电导航:
- 优点:不受时间、天气限制,精度高,作用距离远,定位时间短,设备简单可靠
- 缺点:易被发现和干扰,需要载体外的导航台支持
惯性导航系统:
- 优点:完全自主;不受外界的干扰,隐蔽性好,无法被反利用;使用环境不受限制;导航数据完整;数据更新率高、短期精度和稳定性好
- 缺点:误差随时间积累
惯性导航系统
分类方式
- 按照有无机电式实体平台:平台式和捷联式
- 按照选用的陀螺仪类型不同:液浮陀螺、三浮陀螺、挠性陀螺、静电陀螺、激光陀螺惯导系统和光纤陀螺惯导系统等
- 按照装备对象的不同:舰载、机载和车载惯导系统等
惯性导航系统的特点
- 自主性
- 隐蔽性
- 全球性
- 抗干扰性
- 连续性
- 完备性
惯性传感器
- 陀螺仪
- 加速度计
惯性导航基础知识
坐标系
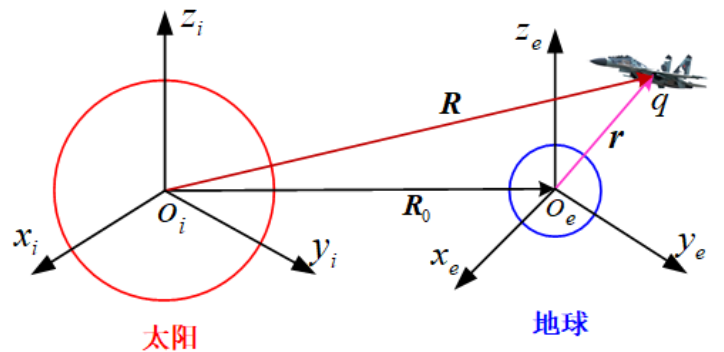
太阳中心惯性坐标系(
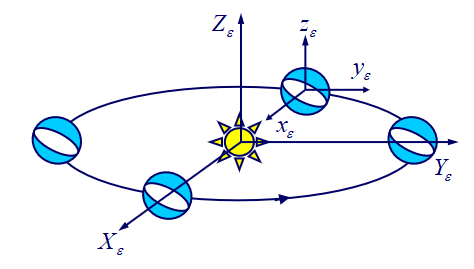
- 原点
:太阳中心 轴:在黄道平面内,指向春分点 轴:沿地球绕太阳的角速度方向 轴:在黄道平面内,与其他两轴构成右手坐标系
天体位置一般使用球坐标
:天体至太阳中心距离 :黄经, :黄纬,
地心惯性坐标系(
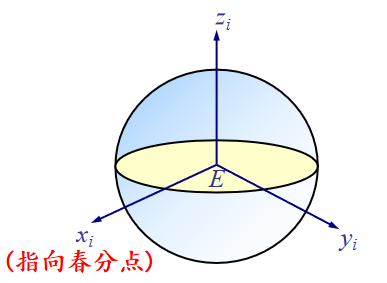
- 原点
:地球中心 轴:垂直于赤道平面,指向北极 轴:在赤道平面内,指向春分点方向 轴:在赤道平面内,与其他两轴构成右手坐标系
此坐标系原点虽位于地心,但各轴指向不随地球自转而旋转,在航天动力学研究中一般作为惯性基准。但值得注意的是其具有角加速度
地球坐标系(
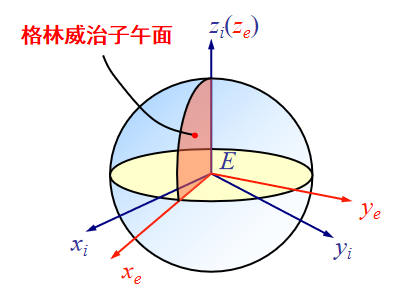
- 原点
:地球中心 轴:垂直于赤道平面,指向北极 轴:在赤道平面内,沿着格林威治子午面与赤道平面的交线 轴:在赤道平面内,与其他两轴构成右手坐标系
此坐标系与地球固连,因而具有地球自转角速率
地理坐标系(
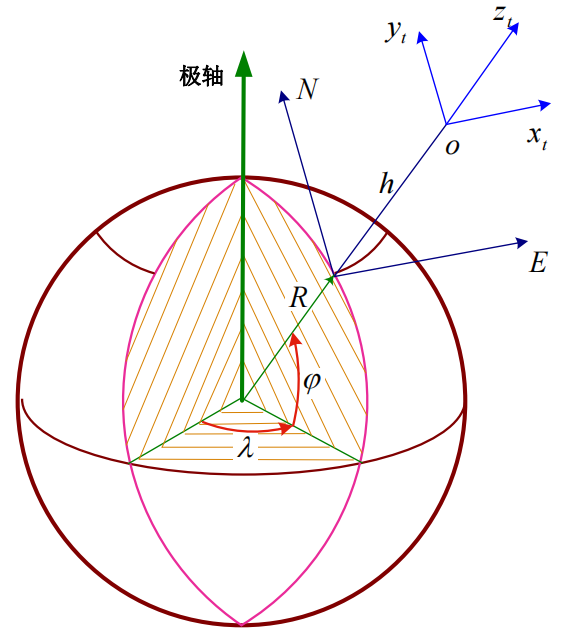
- 原点
:地球中心 轴:沿当地地理垂线并与 轴构成右手直角坐标系 轴:沿当地纬线指东 轴:沿当地子午线指北
其中
注意点:运载体相对地球运动将相当于地理坐标系相对地球坐标系运动(转动)
载体坐标系(
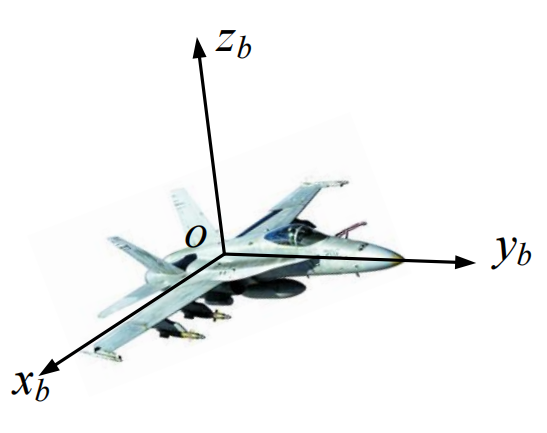
- 原点
:运载体的质心 轴:沿运载体竖轴并与 轴构成右手直角坐标系 轴:沿运载体横轴指右 轴:沿运载体纵轴指前
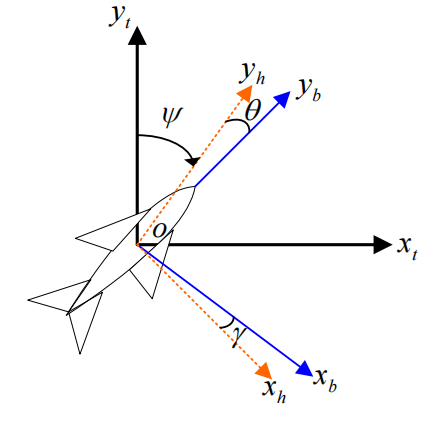
- 航向角(
):地理坐标系 轴与载体坐标系 轴在水平面的投影的 轴的夹角,偏东为正 - 俯仰角(
): 轴与 轴的夹角,抬头为正(高于水平面为正) - 横滚角(
): 轴与其在水平面内的投影 轴的夹角,右倾为正,左倾为负
地理坐标系相对惯性参考坐标系的转动角速度
可以分为两个部分,统一投影到地理坐标系
地理坐标系相对地球坐标系的转动角速度
设运载体纬度为
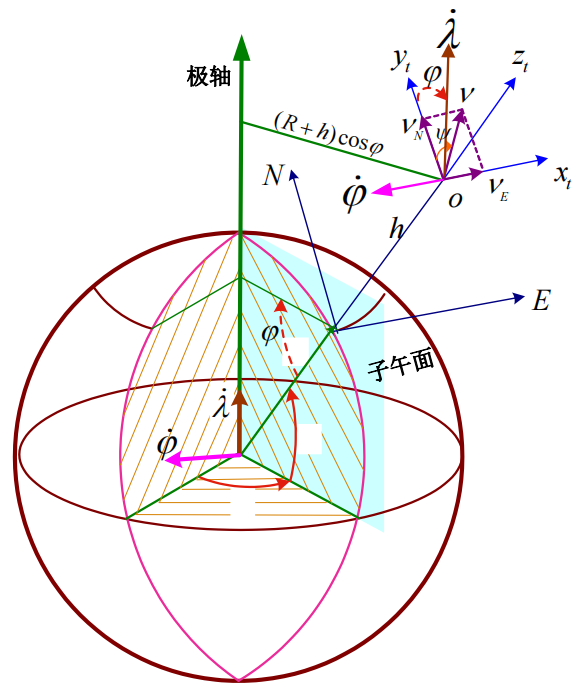
由图计算可得:
地球坐标系相对惯性坐标系的运动角速度
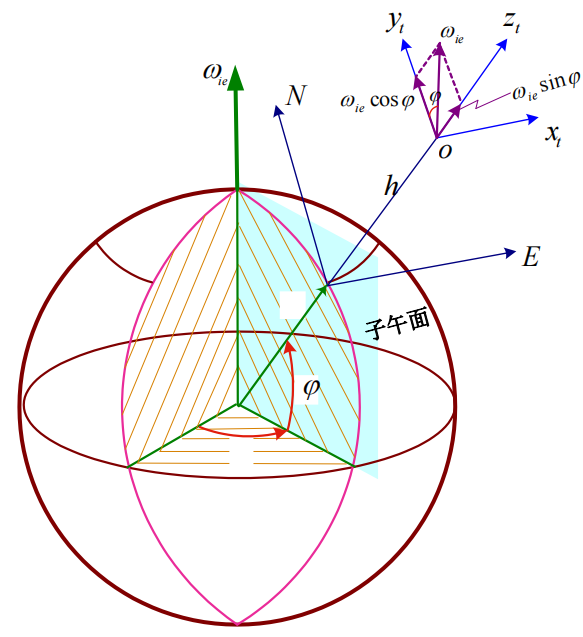
投影到地理坐标系:
复合运动
注意点:这里都是向量形式,为简洁原因,不再加上划线
位置关系:
加速度关系:
比力方程
加速度计
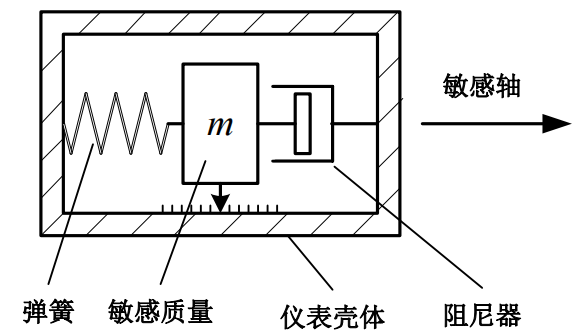
比力
加速运动时
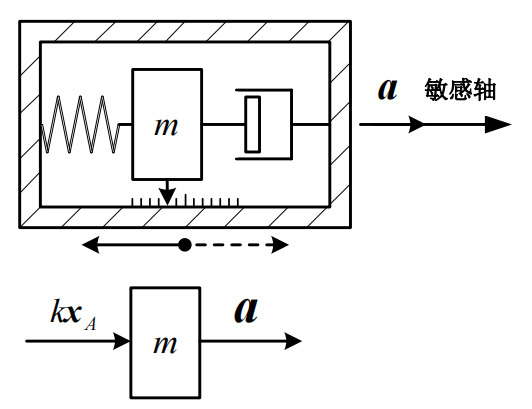
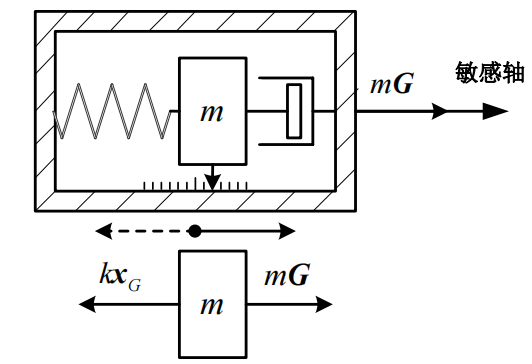
加速度计所敏感的比力
设地球引力加速度
化简为:
舒勒摆
基础概念
舒勒原理:一个指示垂线的装置,如果固有振荡周期等于84.4 min,则当运载体在地球表面以任意方式运动时,此装置将不受运载体加速度的干扰
舒勒调谐:通过选择参数使一个指示垂线的装置满足舒勒原理的条件
物理摆的舒勒谐调条件
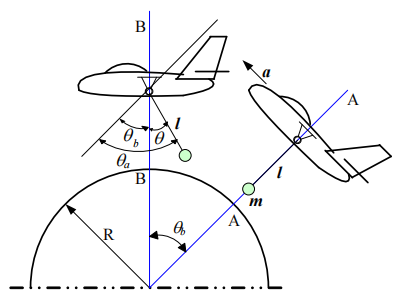
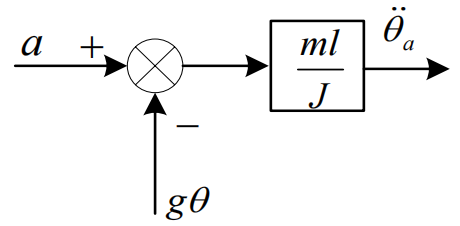
物理摆的运动方程式:
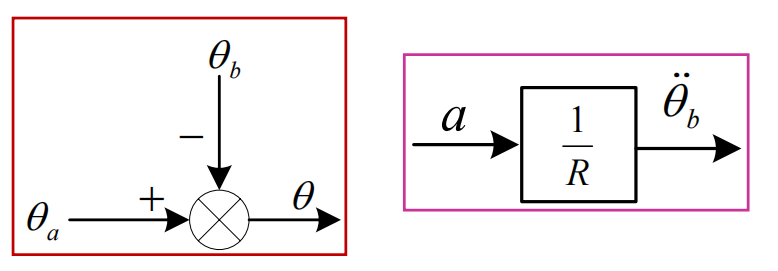
控制方块图:
总控制图:
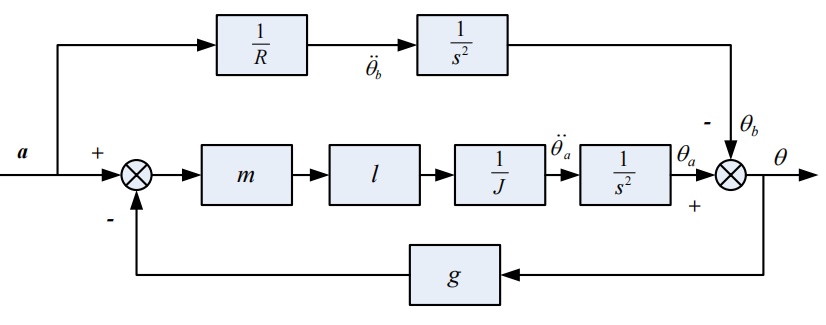
舒勒调谐条件:
地球参考椭球
地球近似于一个对称于极轴的扁平旋转椭球体:
旋转椭球体的椭圆度或扁率:
重力方向:旋转椭球面的法线方向来代替重力方向
地心纬度和地理纬度
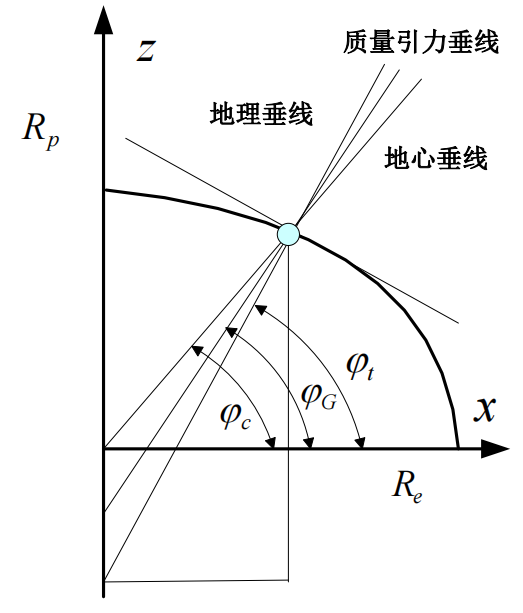
- 地心纬度:地球上一点与地球几何中心的连线(地心垂线)和地球赤道平面之间的夹角。用于大地测量
- 地理纬度:地球子午圈上某点的法线(地理垂线)与地球赤道平面的夹角。用于导航定位
曲率半径
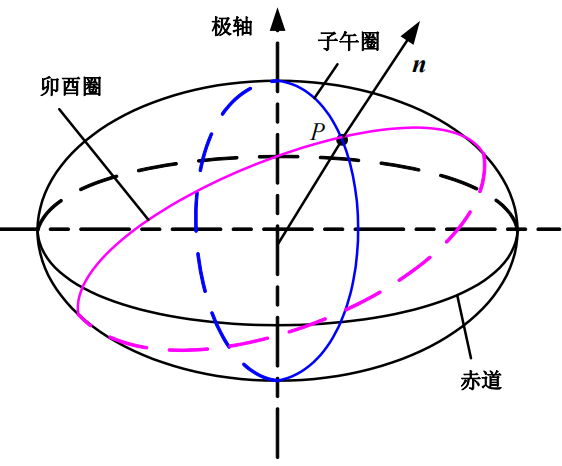
子午圈
P点子午圈:过极轴和P点的平面与椭球表面的交线
P 的子午圈曲率半径:
卯酉圈
P点卯酉圈:过P点法线且垂直于过P点子午面的平面与椭球表面的交线
P 的子午圈曲率半径:
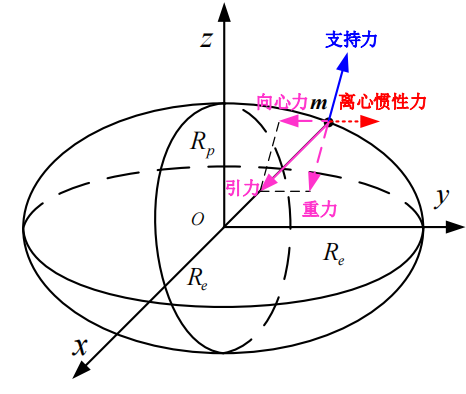
地球重力场特性
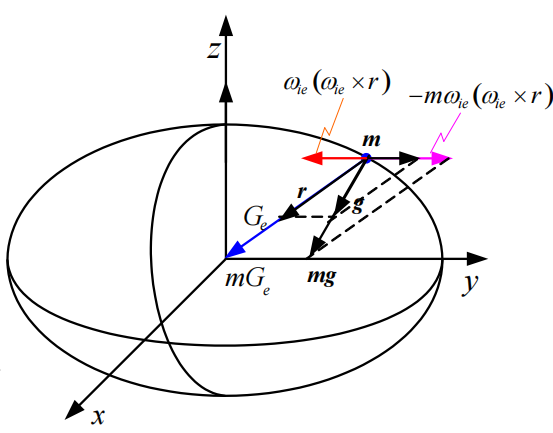
在非惯性系下看,地球重力场是由地球引力场与地球自转离心惯性力形成的:
重力异常:实际重力加速度与理论重力加速度在数值上的偏差
垂线偏差:由于地球自转的影响,引力加速度
陀螺仪
基础概念
陀螺仪:利用动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或两个角运动的装置
陀螺仪的自由度数目:通常是指自转轴可绕其自由旋转的正交轴的数目
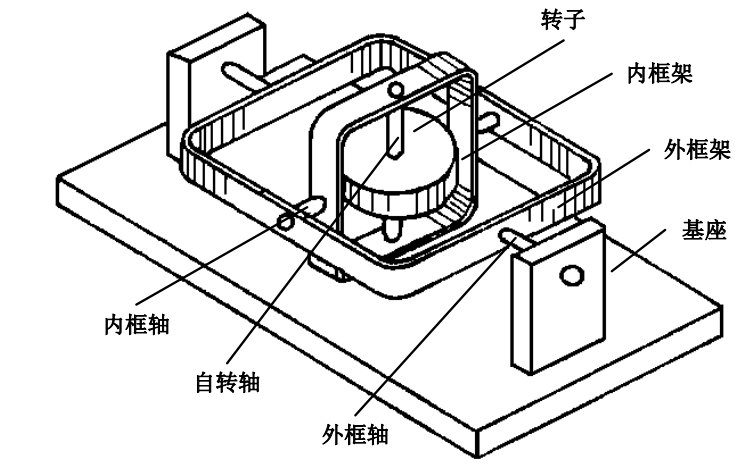
二自由度陀螺仪的基本特性
进动性
- 标题: 惯性导航基础
- 作者: yjy12lcp
- 创建于: 2023-10-20 18:19:03
- 更新于: 2023-10-21 21:57:06
- 链接: https://yjy12lcp.cn/2023/10/20/惯性导航基础/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。