视觉SALM第二节课

三维空间刚体运动
点、向量和坐标系
空间的一组基
反对称矩阵
坐标间欧式变换
欧式变换:通过旋转和平移进行变换
向量
定义n维旋转矩阵的集合:
最终欧拉变换关系为:
变换矩阵与齐次坐标
欧式变换:
优点:使用齐次坐标,多次欧式变换将会有优良形式与线性关系
旋转向量和欧拉角
旋转向量
一个三维向量,指向旋转轴,长度等于旋转角,称为旋转向量,表示为
罗德里格斯公式给出旋转向量到旋转矩阵的变换:
欧拉角
缺点:万向锁问题,可论证只要用三个实数表达三维旋转,都不可避免碰到奇异性问题
四元数
我们找不到不带奇异性的三维向量描述方式。四元数既是紧凑的,也没有奇异性
四元数
四元数表示旋转
将三维空间点用四元数表示:
四元数到其他旋转表示转换
四元数到旋转矩阵:
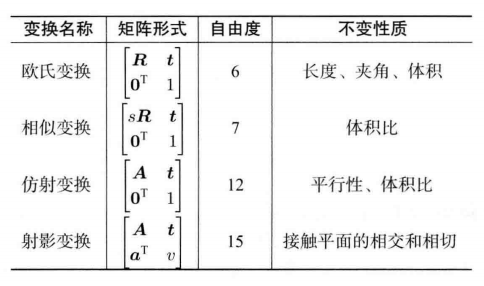
其他变换
相似变换
三维相似变换的集合称作相似变换群,记作
仿射变换
可逆,但不正交
射影变换
缩放
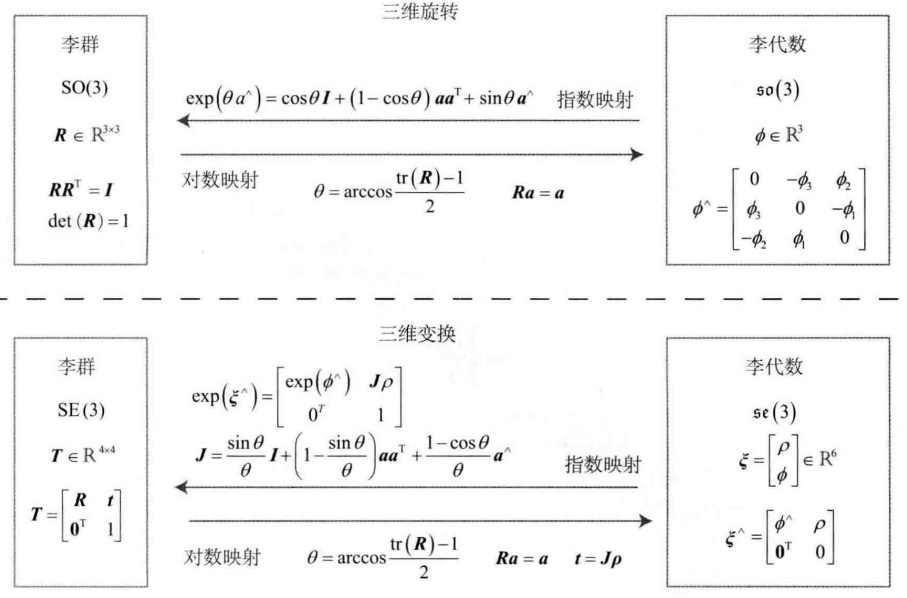
李群与李代数
李群
集合
李群:具有连续(光滑)性质的群
李代数
李代数的引出
于是上述式子看作解纯量微分方程且,可以得到:
李代数的定义
集合
其中二元运算称作李括号
李代数
李代数
在此定义下的李括号为:
指数与对数映射
定义指数映射:
化简得:
其中:
对应关系总结
李代数求导与扰动模型
- 标题: 视觉SALM第二节课
- 作者: yjy12lcp
- 创建于: 2023-09-11 15:53:29
- 更新于: 2023-09-18 16:29:10
- 链接: https://yjy12lcp.cn/2023/09/11/视觉SALM第二节课/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。