视觉SLAM基础第一节课

SLAM定义及目的
同步定位与地图构建
SLAM经典框架
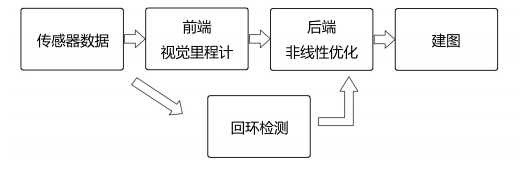
- 传感器信息读取:在视觉SLAM中主要为相机图像信息的读取和预处理。如果是机器人中,还可能是码盘、惯性传感器等信息的读取和同步
- 前端视觉里程计(Visual Odometry,VO):视觉里程计的任务是估算相邻图像间相机的运动,以及局部地图的样子,又称为前端(Front End)
- 后端非线性优化(Optimization):后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对他们进行优化,得到全局一致的地图。由于在VO之后,又被称为后端(Back End)
- 回环检测(Loop Closure Detection):回环检测机器人是否到达过先前的位置,如果检测到回环,它会把信息提供给后端进行处理。
- 建图(mapping):它根据估计的轨迹,建立与任务要求对应的地图
视觉SLAM传感器
单目相机:
无绝对深度信息,只能相对深度估计。估计轨迹与真实轨迹差一个因子——尺度,具有尺度不确定性
双目相机:
两个单目之间距离——基线,通过基线估计像素空间位置(深度)
优点:被动测量深度,消除尺度不确定性 缺点:配准复杂,计算大,特征少视差不容易计算
深度相机(RGB-D):
飞行时间法(TOF)或红外结构光主动测量深度
缺点:使用场景范围小(反射光原因)
视觉里程计
估算相邻图像间相机的运动
累计漂移问题——每次只估计两张图像之间关系,通过回环检测与后端优化解决
SLAM数学描述
杂点
SLAM(考虑时间先后顺序,实时)与MVS,SFM(不考虑时间先后,离线)
- 标题: 视觉SLAM基础第一节课
- 作者: yjy12lcp
- 创建于: 2023-09-04 15:51:21
- 更新于: 2023-09-05 14:01:30
- 链接: https://yjy12lcp.cn/2023/09/04/视觉SLAM基础第一节课/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。
评论